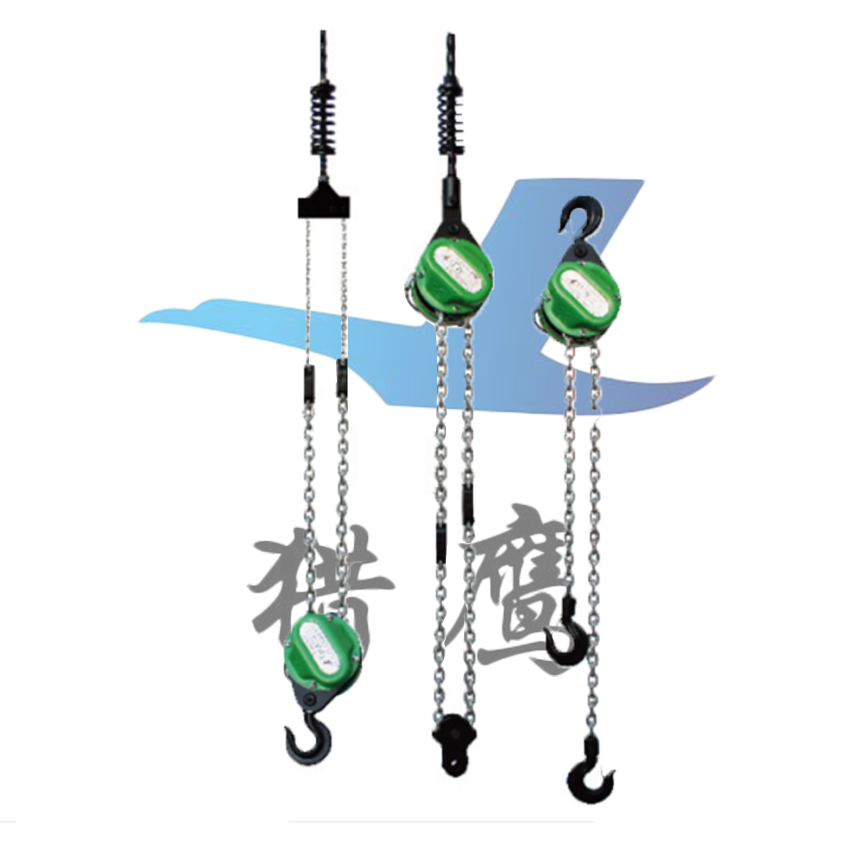
倒掛
群吊電動葫蘆是在DHP型
群吊電動葫蘆的基礎上進行設計的,因為正掛環鏈電動機器機尾鏈懸掛在空間中,易跟腳手架發生纏繞導致事故的問題發生。
在建筑施工地中外墻腳手架常采用附著式升降腳手架,該腳手架使用的多采用正掛DHP型環鏈電動機器進行整體。工作時,正掛環鏈電動機器將腳手架到位后停止工作,在下一次之前需要將設備吊運到建筑物的上一層懸掛到附墻支撐上,再進行下一次的腳手架整體,而正掛環鏈電動機器是通過人力或小型機械吊運到上一層的。設備的吊運需要耗費大量的人力和物力,大大增加了生產成本也增加了施工現場的隱患。正掛環鏈電動機器在工作過程中尾鏈懸在作業空間中,容易跟腳手架架體發生纏繞。容易發生故障和事故,且懸在作業空間中的尾鏈會有晃動,影響工作人員視線,不利于流暢作業并且容易引發設備故障和事故;而倒掛群吊電動葫蘆先啟動起升電動機,把重物起升到適當的高度,再啟動運行電動機把重物運到指定的位置,運行小車在單工字鋼梁的下緣行走。 行走時采用一個電動機驅動運行小車兩邊的車輪。由于行走速度比較小,因此運行小車一般不設制動機構。運行小車在行走時,為防止重物下降,在起升機構上設置了一個電磁制動器這樣就避免了之前的不便。